Student ,researcher & industry collaborative volunteers. Engaging with healthcare & robotics in challenging environments.
ABOUT
I joined the Hearts team in my first year of University. The team comprises of talented and hardworking individuals from Undergrad to PhD students.
A unique student & research collaborative: Assistive living and challenging environment robotics
Description
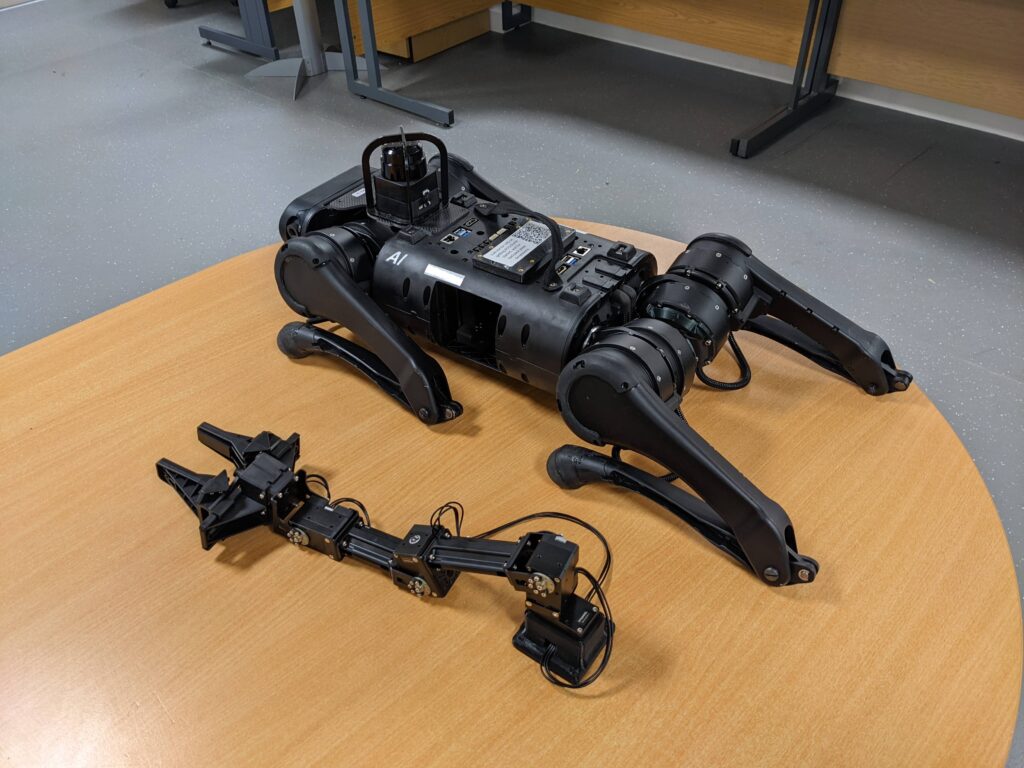
The Robot is owned by Hearts team, we use this robot for variety of applications, from SLAM to payload delivery, this robot can do it all. Avoids obstacles within 0.8m of the robot’s visual range. The A1 is capable of detecting the obstacle shapes and adjust to prevent collision. Realtime display of the adjustment of robot body, maximum distance and area within the visual angle, and the range of walking track.
Advanced dynamic balancing algorithm enables the A1 platform to quickly adjust to prevent impact or falling
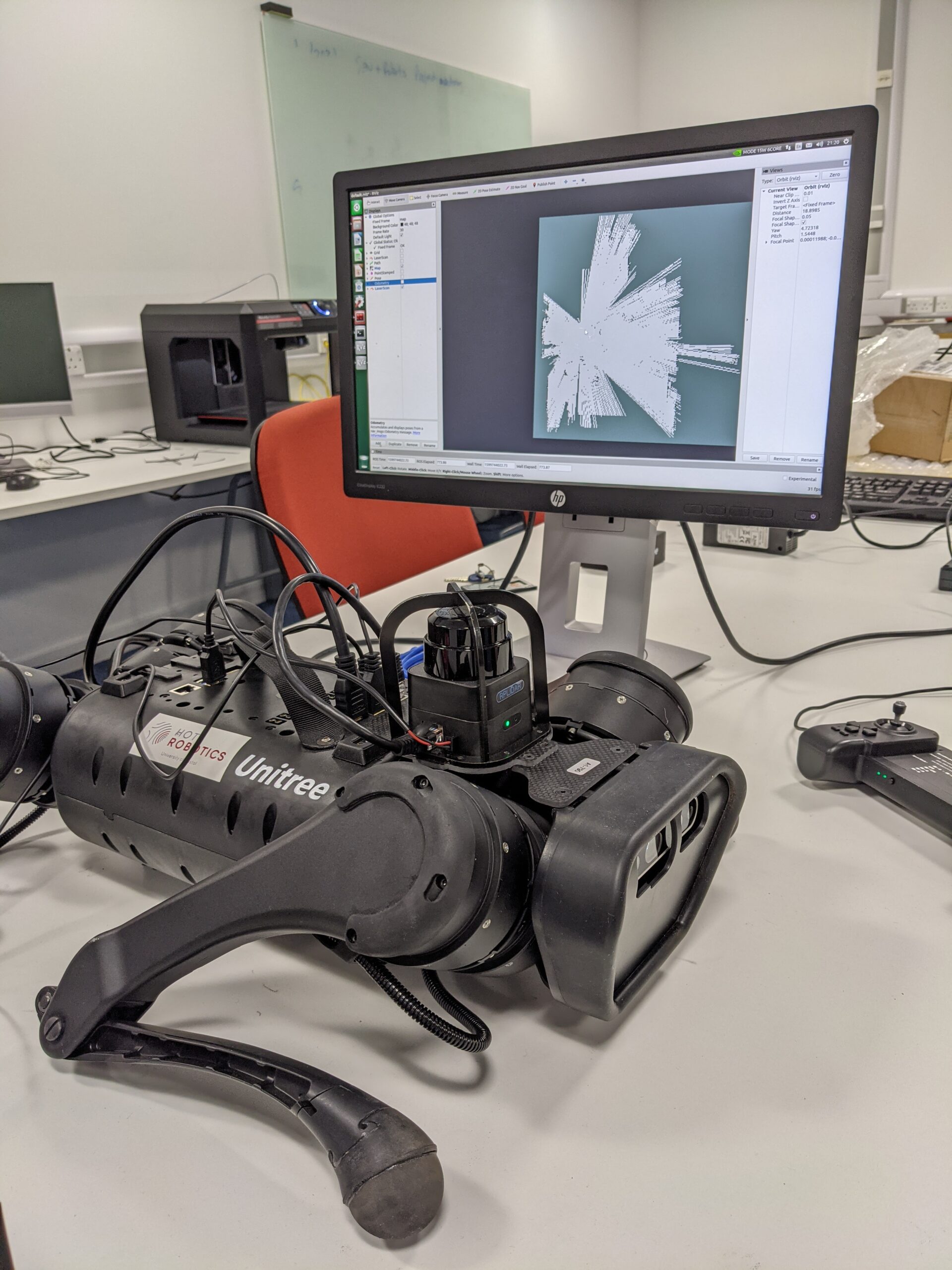
With the addition of a high precision lidar unit the A1 is able to support map building, autonomous positioning, navigation planning as well as dynamic obstacle avoidance.
Project 1: SLAM Map Generation of Bristol Robotics Lab
The first project focused on utilizing the Simultaneous Localization and Mapping (SLAM) capabilities of the A1 Robot. The main objective was to create a detailed and precise map of the Bristol Robotics Lab, and to demonstrate the Robot’s autonomous positioning and navigation planning features.
SLAM algorithm allowed the A1 robot to localize itself within the mapped environment, which enabled it to navigate the lab space autonomously. The robot was also able to efficiently reroute its path in response to the introduction of unexpected obstacles in real-time, thanks to its dynamic obstacle avoidance feature.
Project 2: Payload Delivery with Dynamic Balance Adjustment
The second project demonstrated the A1 Robot’s dynamic balancing and payload delivery capabilities. With the advanced dynamic balancing algorithm, the robot was capable of carrying payloads while maintaining stability and avoiding any potential impact or falling. The robot’s balancing algorithm quickly and effectively adjusted to various weights and positions of payloads, which facilitated a secure and balanced transport process.
As part of the project, the robot was programmed to pick up a payload from a designated location and deliver it to a specific destination within the Bristol Robotics Lab. The robot effectively avoided obstacles within its 0.8m visual range while carrying the payload. Even in scenarios with unexpected path disruptions, the robot successfully identified and circumvented the obstructions, demonstrating its adaptability and robustness.