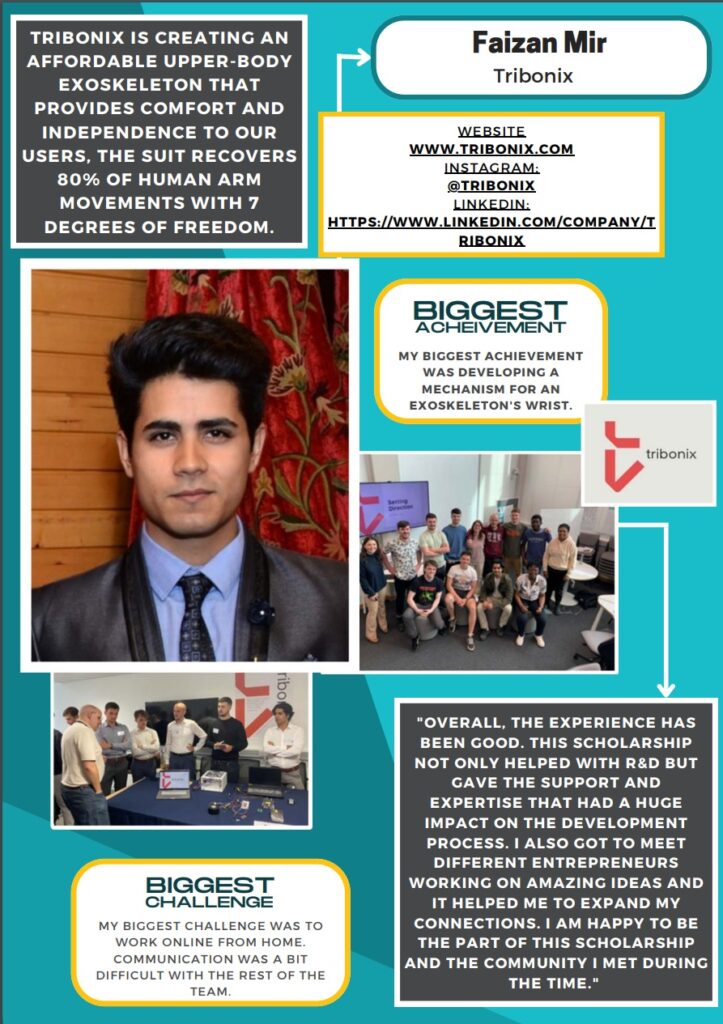
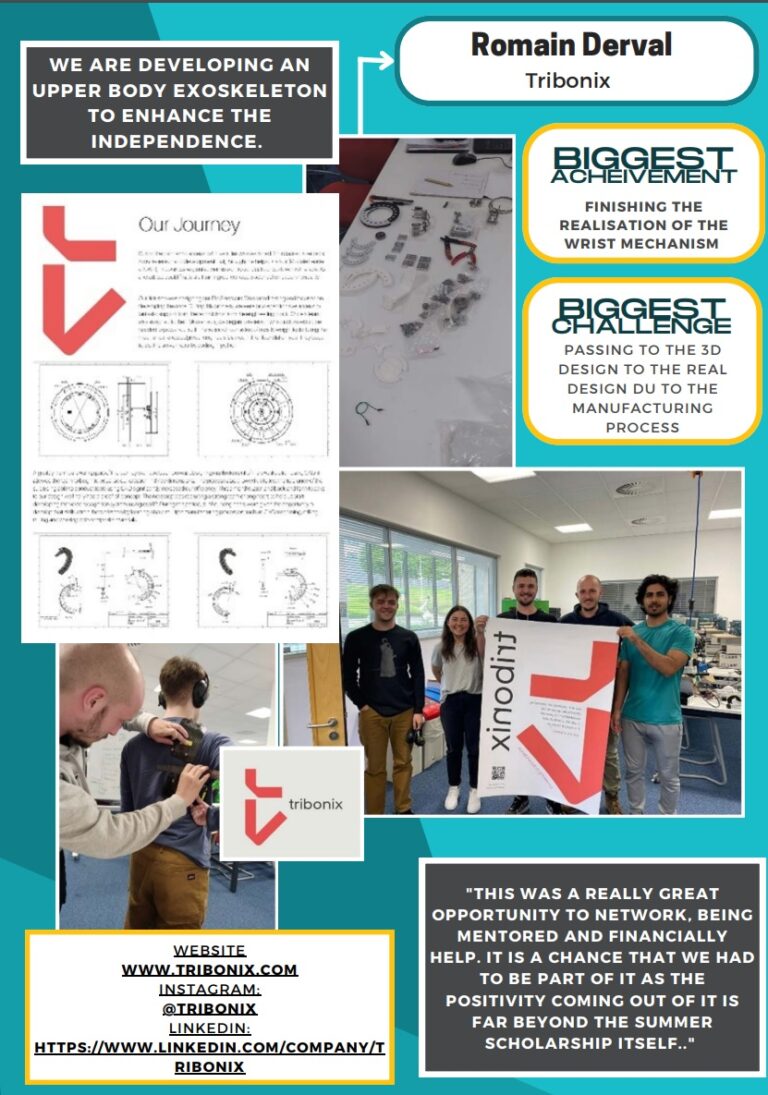
Tribonix is building upper-body exoskeletons for augmenting the manual workforce. The everyday physical demand of a worker within logistics has never been easier. Tribonix is an early-stage startup, soon to have completed our first prototype. Tribonix is currently a part of the 2022 Launch Space incubator cohort home to high-tech, innovative start-ups.
ABOUT
I joined the startup when it was at a very early stage, some research had been done by the co-founders of the startup, I designed some initial prototypes, was involved in CNC milling the components, did some machining of parts. I then started working on the actuators and control of the joints.
Description
The Robot was designed by the amazing team of engineers here at BRL Hearts, the frame was made from the Aluminum Extrusions and the mounts were 3D Printed. For the joints Brushless geared actuators were used, to control the motors, CAN Protocol was used.
Project 1: Prototype Design and Fabrication
At the nascent stage of Tribonix, I was tasked with designing the initial prototypes of the upper-body exoskeletons. The main objective was to materialize the research work already conducted by the co-founders into a functional model. The design process involved creating detailed CAD models that included all the vital components of the exoskeleton, taking into consideration ergonomics, efficiency, and safety.
After finalizing the prototype designs, I proceeded to the fabrication phase. I personally conducted CNC milling operations to create the components as per the specifications of the design. This also involved machining of certain parts that required specific dimensions and finishes. The precision and expertise involved in this phase were critical to the successful assembly of the exoskeleton.
Project 2: Actuator Development and Joint Control
In the second project, my focus shifted to the core elements that would power and control the exoskeleton – the actuators and the joint control mechanisms. This was a challenging endeavor, as it demanded a deep understanding of kinematics and control theory.
For the actuators, the design was aimed at generating sufficient torque to assist the manual workforce, while also ensuring that the components were durable and reliable. I engaged in selecting the appropriate actuators and designing the control mechanisms that would effectively command the actuator’s operation.
The successful completion of these projects contributed to Tribonix’s rapid progression towards its first functional prototype. These hands-on experiences in the fields of prototype design, CNC milling, actuator development, and control system design have been crucial in realizing the company’s vision of augmenting the manual workforce.