I have been making these projects from my School days, they have allowed me to grasp deeper understanding of electronics, hardware, software and algorithms.
These projects were very fun and cool to show off to other students
ABOUT
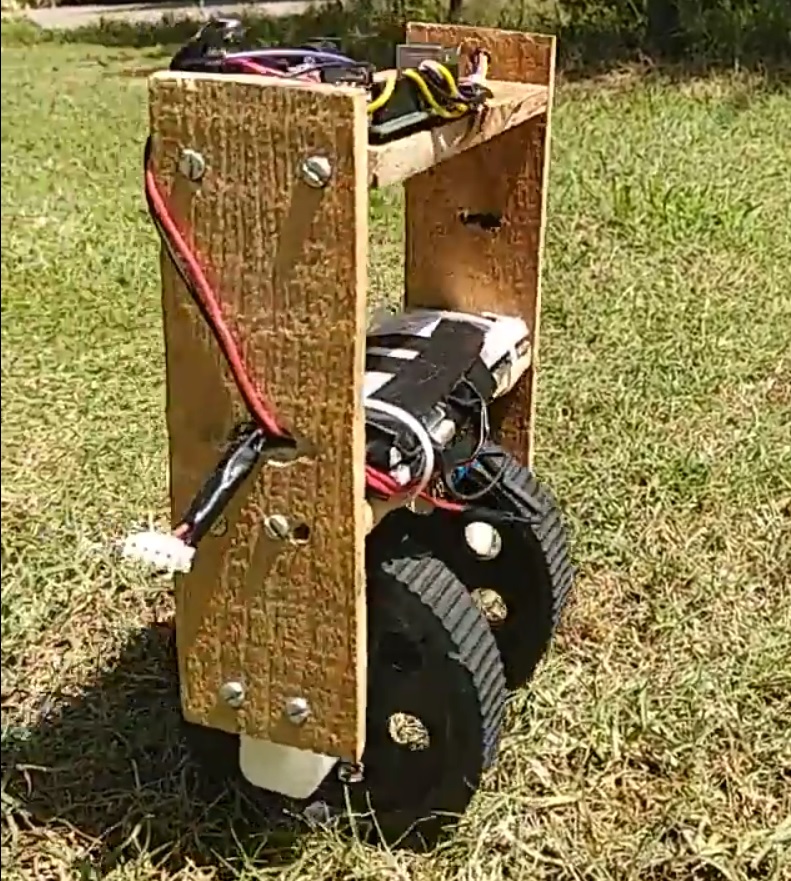
A Self Balancing Robot is a remarkable innovation that has the ability to maintain its upright position by counterbalancing its own weight. The development of this particular self-balancing robot has been an interesting journey, crafted with resourcefulness and creativity.
Description
Frame
The frame of the robot serves as its skeleton and provides structural integrity. It was fabricated using wood, an easily accessible and malleable material, contributing to the overall light weight of the robot.
Power Source
The robot is powered by a Lithium Polymer Battery, known for its high energy density and recharging capability. This ensures that the robot has an adequate power supply to drive its motors and sensors.
Control System
At the heart of the control system lies an Arduino board, a versatile and user-friendly microcontroller platform. It’s responsible for processing the data and translating it into actionable commands for the robot’s various components.
Sensing
An IMU (Inertial Measurement Unit) sensor paired with the Arduino is used to measure the robot’s orientation and motion. This information is crucial for understanding the robot’s current state and making real-time adjustments to maintain its balance.
Motors
Regular DC motors, salvaged from a toy car, are used to drive the robot’s wheels. While not necessarily designed for this specific application, these motors have proven to be an effective and budget-friendly choice.
Motor Controller
The motors are driven by a motor controller, which receives its inputs from the Arduino board. The motor controller acts as an intermediary, translating the Arduino’s commands into the precise voltage and current needed to move the motors in the required manner.