Student ,researcher & industry collaborative volunteers. Engaging with healthcare & robotics in challenging environments.
ABOUT
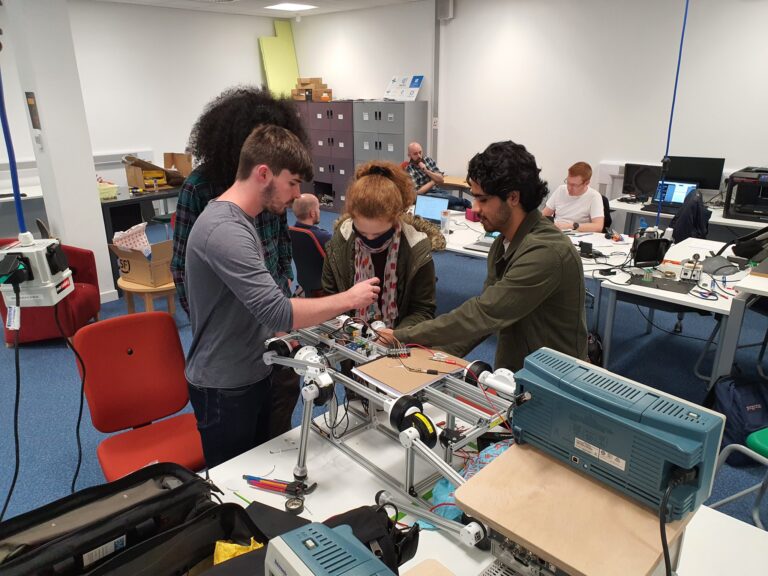
I joined the Hearts team in my first year of University. The team comprises of talented and hardworking individuals from Undergrad to PhD students.
A unique student & research collaborative: Assistive living and challenging environment robotics
Description
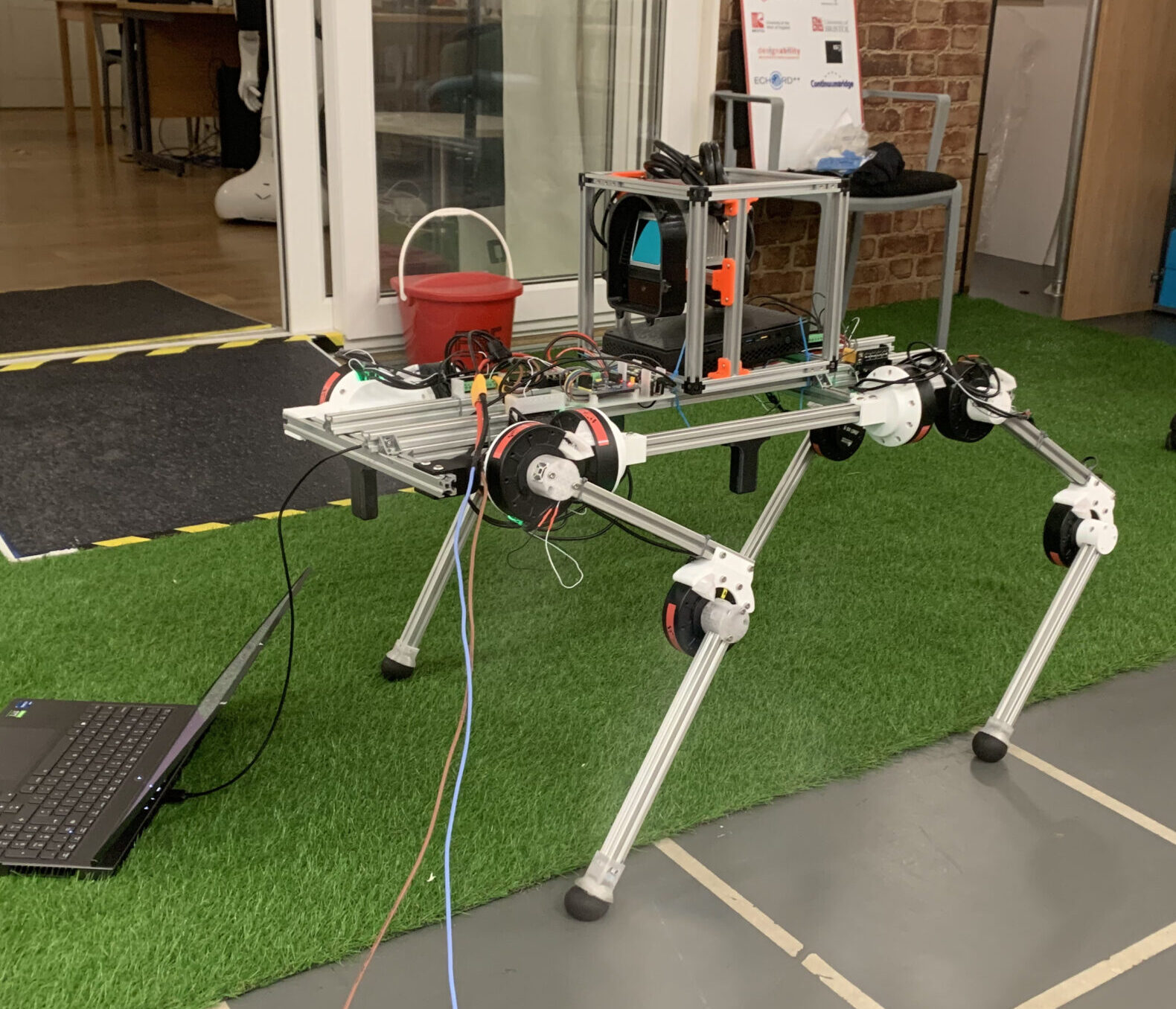
The Robot was designed by the amazing team of engineers here at BRL Hearts, the frame was made from the Aluminum Extrusions and the mounts were 3D Printed. For the joints Brushless geared actuators were used, to control the motors, CAN Protocol was used.
Project 1: Robotic Actuator Control System
The initial phase of the project involved extensive research and the selection of suitable connectors from Harwin to facilitate the operating voltage range of the brushless geared actuators (24v-48v). The actuator’s wiring was meticulously done, following which the actuators were tested using a Teensy microcontroller. This provided crucial insight into the actuator’s operational characteristics, which guided the next stages of the project.
Post the initial testing, custom Printed Circuit Boards (PCBs) were designed specifically to accommodate the Harwin connectors. This led to a streamlined connection of the actuators to the robot’s control system. All the wiring for the robot was completed efficiently, setting up a robust infrastructure for the control system.
Project 2: Kinematic Modelling and Balance Control
The second project phase focused on developing the robot’s kinematics and balance control. With the frame and actuators in place, the team embarked on the task of making the robot stand and move. The kinematic modelling was based on the robot’s physical characteristics and the capabilities of the brushless geared actuators. This process involved setting up the mathematical representation of the robot’s movement and applying them to the control system.
In this phase, I also engaged in the fine-tuning of the brushless geared actuators. This involved adjusting the Proportional-Integral-Derivative (PID) values to achieve desired speed, torque, and position control of the actuators. With careful tuning and testing, the team was successful in making the robot stand autonomously. The successful completion of this phase not only demonstrated the effectiveness of the actuator control system but also validated the kinematic model developed for the robot.
These projects provided practical insight into the design and control of robotic systems. The process of wiring, testing, and tuning the actuators, followed by designing the kinematic model, showcased the critical aspects of creating a functioning, autonomous robot from the ground up. The experiences and knowledge gained from these projects are invaluable in advancing robotic technology at BRL Hearts.